Door-Climbing Robot
The robot was designed to pull a 0.5 kg load a vertical distance of 0.8 m up a door in under 180 seconds, while moving continuously and contacting only the door’s vertical surfaces. The primary design problems were preventing the robot from falling or slipping, minimizing mass, maximizing strength and power output, and minimizing time. This was a team project, so design and analysis was shared between team members. Each team member 3D printed all plastic parts individually.
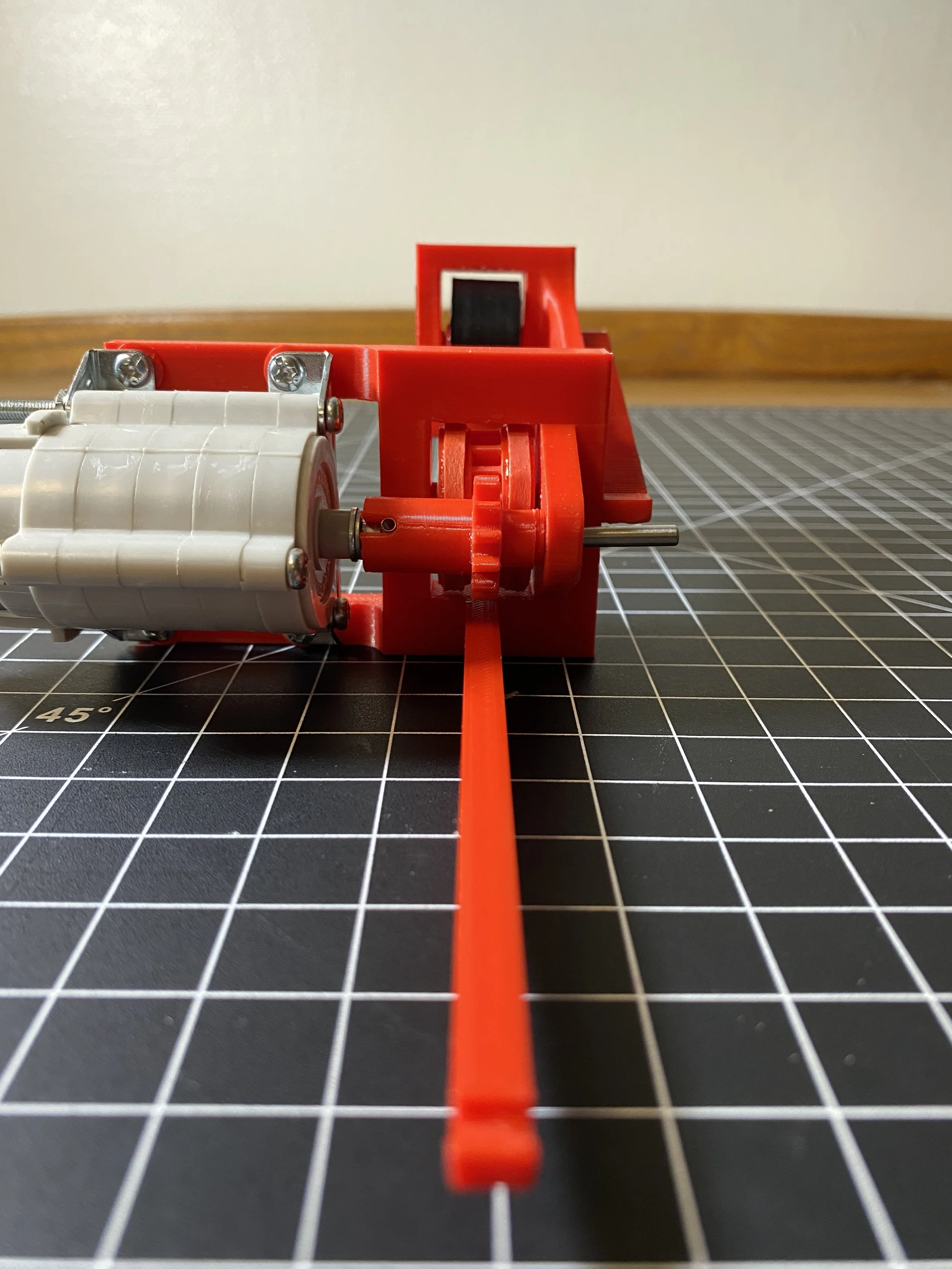
Materials and Components: PLA plastic (3D printed); catalog parts were metal bushings, metal shafts, Mabuchi RC-260SA-2295 motor and gearbox
Processes: SolidWorks (CAD & FEA), 3D Printing via Creality Ender 3, Back of the Envelope Analysis, Power Analysis
Course: ME 104: Mechanical Systems Design, Stanford University